-

AMA 과제 소개
인공윤리 에이전트 개발인간과 로봇이 서로 진정한 소통을 하기 위해서는 인공지능에 도덕적인 요소들이 함께 접목되어 개발되어야 한다.
-

AMA 소스코드
AMA메타패키지 다운로드OP용 AMA 버전1.0 메타패키지를 다운받으세요.
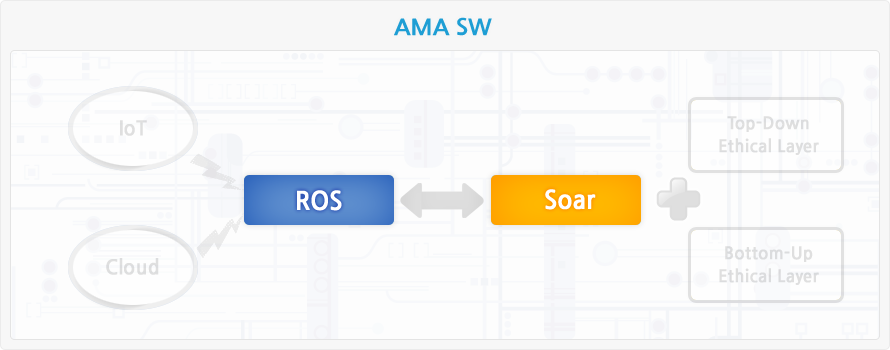
* 주관기관(동아대학교): ROS와 Soar를 연동한 AMA용 ROS-Soar 패키지 개발 및 기본적인 음성인식/합성, 영상인식 패키지 연결
* 참여기관(서울교육대학교): Top-down 방식의 윤리적 의사결정 모델(윤리적추론과 의사결정) 개발
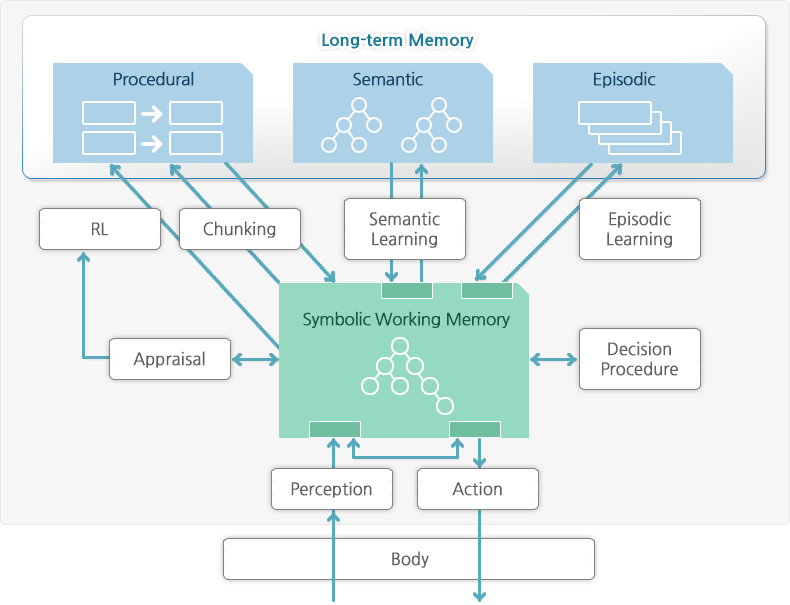
- Soar 전체 알고리즘 이해: Soar의 소스코드를 분석하고, 장기기억 메모리인 Procedural Memory, Semantic Memory, Episodic Memory의 동작원리를 이해하고, 새로운 규칙을 자동 생성하는 chunking과 Soar의 자가 학습 기능(강화학습, Semantic Learning, Episode Learning) 파악
- Soar의 SML(Soar Markup Language)을 이용하여 ROS 플랫폼과 Soar 아키텍처 연계
- ROS-Soar 패키지에 기본 음성인식 및 합성, 영상인식 패키지 연결 및 성능 고도화
ㆍ 음성인식 패키지: CMU Sphinx의 pocketsphinx 적용
ㆍ 음성합성 패키지: festival 기반으로 만들어진 sound_play 패키지 적용
ㆍ 영상인식 패키지: find-object 패키지 적용
ㆍ 음성합성 패키지: festival 기반으로 만들어진 sound_play 패키지 적용
ㆍ 영상인식 패키지: find-object 패키지 적용
- 콜버그의 인습이전 수준(pre-conventional level)에 맞는 윤리모듈 연구(처벌 및 복종 지향/ 개인주의, 도구적 목적 및 거래 지향)
- 콜버그의 인습이전 수준은 2단계로 구성되어 있는데, 제1단계에 속하는 아동은 처벌(punishment)에 근거하여 규칙을 지키거나 복종을 하며, 사람과 소유물에 대한 물리적 손상을 피하는 것을 옳다고 판단한다. 또한 옳은 것을 행하는 이유가 처벌을 피하고 권위자의 우월한 힘에 복종하는데 있다고 생각한다. 이 시기의 아동들은 다른 사람의 이익을 고려하지 않거나 그들이 자신과 다르다는 점을 인정하지 않고, 자신의 관점과 권위자의 관점을 혼동하며, 다른 사람의 심리적인 입장보다는 물리적인 결과를 중요시하는 특성을 보인다.
-제2단계에 속하는 아동은 자신에게 직접적인 이익이 될 때에만 규칙을 따르고, 자신의 이익과 필요에 부합되면 행동하고 다른 사람도 그렇게 하도록 한다. 또한 상호간에 동등한 교환, 거래를 옳은 것이라고 판단하며, 옳음을 행하는 이유를 다른 사람도 이해관계를 가지고 있다는 것을 인정해야 하는 세상에서 자신의 필요와 이익에 충실한 것에서 찾는다. 이 시기의 아동은 모든 사람은 추구할 이해관계를 가지며 이러한 이해관계는 갈등을 일으킬 수 있다고 보고, 구체적인 개인주의 입장에서 옳음은 상대적이라고 보는 특성을 보인다. 따라서 각 단계별로 수준에 맞는 도덕적 원칙들을 제시하고 체계화하여 이를 통해 윤리적 추론 형식을 개발하여 다양한 문제 상황에 대한 판단을 할 수 있는지의 여부를 통해 윤리모듈을 개발한다.
- 콜버그가 말하는 인습이전 수준의 도덕판단 발달 단계의 특징에 대한 심층 분석 및 구조화
ㆍ 인습이전 수준에 속하는 아동의 도덕성 발달 실태에 대한 범문화적 일반화 도출
ㆍ 이 시기 아동의 윤리적 추론과 의사결정에 영향을 미치는 주요 요소 및 요소 간 상호 작용의 메커니즘 분석
ㆍ 이 시기 아동의 윤리적 추론과 의사결정에 영향을 미치는 주요 요소 및 요소 간 상호 작용의 메커니즘 분석